- Институт
- Зертханалар
- Ғылым
- Іс-шаралар
- Журнал
- Жаңалықтар
- Байланысу
- Кері байланыс

Зерттеудің негізгі бағыттары: Бейнелерді танудың математикалық әдістері, сөйлеу және графикалық сигналдарды өңдеу әдістері, көріністерді өңдеу, динамикалық нысандарды сәйкестендіру және тану, робототехникадағы жасанды интеллект.
Мына төмендегідей нәтижелер алынды:
Тану есептеріндегі математикалық модельдер және топтық синтез алгоритмі;
Синтез әдістері мен модельдері және сөйлеу мен графикалық сигналдарды тану;
Тану жүйесін диктордың жеке ерекшеліктеріне лайықтап автоматты құрылымдау әдістері әзірленді;
Бет-әлпетін және қол шараларын тануды программалық қамтамасыз ету;
Роботты интеллекттендірудің көру бойынша да, сөйлеу бойынша да негіздері жасалды;
Әзірленген үш өлшемді машиналық көру және нысанды ізбе-із бақылау мүмкіндігін пайдаланатын программалық қамтамасыз етуі бар және жабдықтары бар әмбебап мобильдік робототехникалық платформа жасалды.
|
Ғылыми жұмыстарға арналған мобильдік платформа |
Әскери және арнайы азаматтық қызметтерге арналған машиналық көруі бар шынжыр табанды мобильдік платформа |
|
Кедергілерді айналып өтуге арналған арнаулы мобильдік робот |
Машиналық көруі бар шынжыр табанды робот |
|
«Беркут» жылдам атқышы |
Гексакоптер |
|
Квадрокоптер |
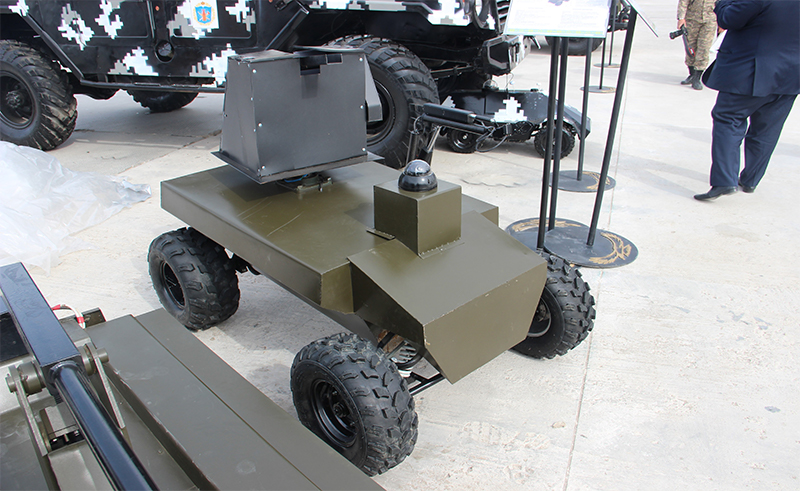
Төрт дөңгелекті барлаушы робот |
|
Алты дөңгелекті барлаушы робот-танк |
Мобильдік мини робот |
Интеллектуалдық меншік туралы куәліктер алынды::
Толепбергенова С.К., Калижанова А.У., Козбакова А.Х. «Электрондық кітапхана» (ЭЕМ-ға арналған бағдарлама) // интеллектуалдық меншік нысаны туралы №967 куәлік, 2015 жыл 25 мамыр.
Авторлық куәлік Software For Architectural Solutions Of Safe And Energy-Efficient Buildings Within The Framework Of The «Smart House» Project / Амиргалиев Е.Н., Калимолдаев М.Н., Калижанова А.У., Козбакова А.Х., Орманов Т.А.; опубл 13.06.2017., Бюл. №1407. –24 с.
Авторлық куәлік Software development for the effective flow distribution during evacuation / Амиргалиев Е.Н., Калижанова А.У., Козбакова А.Х., Қуанышбай Д.Н.; опубл 10.04.2017, Бюл.№648. – 28 с.