- Home
- Institute
- Laboratories
- Science
- Events
- Journal
- News
- Contact
- Feedback

Main directions of the research: mathematical methods of pattern recognition, methods of processing speech and graphical signals, image processing, identification and recognition of dynamic objects, artificial intelligence in robotics.
The obtained results:
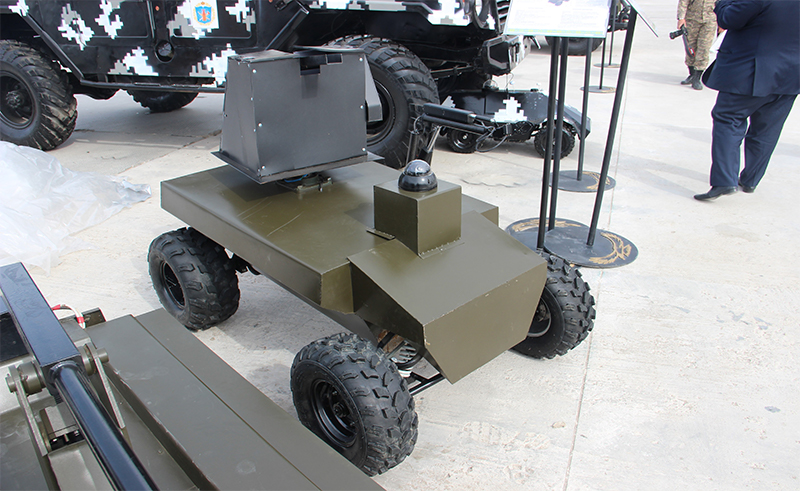
A universal mobile robotic platform with hardware and software support that uses developed algorithms of 3-dimensional machine vision and the ability to track the object has been designed.
|
Mobile platform for scientific purposes |
Tracked mobile platform with machine vision for military and special civil services |
|
Special mobile robot for obstacle avoidance |
Tracked robot with machine vision |
|
High-speed fighter «Berkut» |
Hexacopter |
|
Quadcopter |
Reconnaissance robot |
|
Reconnaissance robot-tank |
Mobile minirobot |
Obtained intellectual property certificates and Patents
K. Tolepbergenova, A. U. Kalizhanova, A. H. Kozbakova “Electronic library” (computer program) // Certificate of state registration of rights to the object of copyright No 967, May 25, 2015
Authorship certificate Software For Architectural Solutions Of Safe And Energy-Efficient Buildings Within The Framework Of The “Smart House” Project / Amirgaliev E.N., Kalimoldayev M.N., Kalizhanova A.U., Kozbakova A.Kh., Ormanov T.A.; published on 06.06.2017., bulletin No. 1407. p 24
Authorship certificate Software development for the effective flow distribution during evacuation / Amirgaliev E.N., Kalizhanova A.U., Kozbakova A.Kh., Kuanyshbay D.N.; published on 10.04.2017, bulletin No 648. p 28.